Past Participating Teams
Check out our teams automated solutions

Robothon® 2023
For the third time, Robothon® - The Grand Challenge has inspired. In 2023 we received 30 great international applications and 20 pre-selected teams took on this year's challenge: dismantling and sorting e-waste.
The Robothon® Teams spent four weeks building and adapting their robot platforms to solve the Grand Challenge of developing robotic skills for the disassembly and sorting of electronic waste. Each team was tasked with developing an algorithm to autonomously solve five manipulation tasks on the competition task board using their own robot platform. The tasks challenged the teams to develop transferable skills with the task board then demonstrated them on a local e-waste object we call the „Bring-Your-Own-Device“ (BYOD) Challenge.
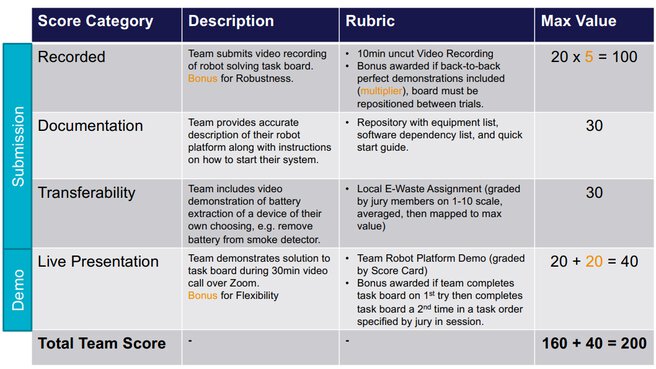
At the end of the development period, teams submitted three deliverables: a video presentation of their team, robot platform, and local e-waste object; a video showcasing their robot autonomously solving the competition task board in back-to-back trials to demonstrate their solution’s robustness; and finally a github repository containing details about their project, list of equipment and software dependencies, and a quick start guide for their demo. Testing our teams further, they had to build their project in a modular way to accommodate an unknown jury task order during the live presentations at the beginning of May. The finalists were awarded at the Award Ceremony at automatica on 29 June 2023 with our special guest Judith Gerlach, State Minister for Digital Affairs.
Take a look at our teams, their motivation, the Finalists Presentation, our Robothon® Insights panel and of course the Award Ceremony 2023 and see who won the race in the end!
Teams 2023
Hello, we are Team RoboPig from the Technical University of Applied Sciences Würzburg-Schweinfurt. We are four students that are enthusiastic about the field of robotics and AI, making the Robothon® Grand Challenge a perfect opportunity for us to play around and gain practical experience. We are sure that the gained knowledge will come in good use during our studies, research and future jobs, carrying the impact of the challenge over to the industry where it is needed. All of us think that the problem of industrial pollution needs to be tackled as fast as possible, which is why we are highly motivated to be a part of the people making it happen. But of course the most important thing for us is to have fun, connect with the other teams and talk to like-minded people.
- Manipulator: Universal Robots UR5e
- End effector: Robotiq Hand-E, 3D Printed Fingertips, Parallel Gripper, Custom Fingertips
- Sensor: On-Arm Camera (Intel Realsense d435i)Fixed External Camera, Microsoft Azure RGB+D Camera, 3D vision sensor, Built-in-Arm Force Sensor
- Tool: 3D Printed Cable Handler
- E-Waste Device: Motherboard component testing RAM, GPU with Oscilloscope
The bisCARI team consists of four PhD students in robotics from the STIIMA Institute of the National Research Council of Italy (each belonging to different universities: University of Brescia, University of Genoa, Polytechnic of Turin). Robothon® 2023 is the perfect occasion to test and compare the results of our research over the past years with the robotics community. Motion planning and Control algorithms can be tested with the Robothon® Task Board as a real challenging scenario in the E-Waste context. Furthermore, this represents an opportunity to improve the skills our research group acquired during the Robothon® 2021 and Robothon® 2022 challenge
- Manipulator: Universal Robots UR10e
- End effector: Robotiq Hand-E, Parallel Gripper, Pneumatically Actuated
- Other effector: Robotiq, 2F-85
- Sensor: Intel Realsense RGB+D d435, Microsoft Azure RGB+D Camera, Built-in-Arm Force Sensor, Fixed External Camera, Arm-Mounted Camera, Built-in Arm Torque
- Tool: Custom printed finger tips
- E-Waste Device: LCD Testing with Multimeter, Cable Wrapping
Team OSCAR is composed of four robotics enthusiasts with backgrounds in robotics hardware and software, informatics and computer vision working at CEA List, a French research technological organization. Through one of its main research program focusing on interactive robotics, CEA List aims at developing interactive intelligent robots able to perform complex assembly or disassembly tasks. Our underlying goal is to develop fast and easy ways to program robots, with intelligent task sequencing, integrated sensing and fault recovery, without sacrificing cycle time. In this context, we had the opportunity to compete in last year Robothon® challenge in order to field test our robot manipulation skills and push them to their limits. Our team was able to realize all the tasks of the board and ranked 6th in the 2022 competition. This year, the team is slightly different but still highly motivated to continue developing and improving the robotic skills for addressing the original and challenging tasks proposed in this new edition.
- Manipulator: Universal Robots UR5e
- End effector: Robotiq HAND-E with Custom, 3D Printed Fingertips
- Sensor 1: 3D vision sensor
- Sensor 2: Photoneo 3D Vision
- Tool: none
- E-Waste Device: Battery voltage tester with OCR of Multimeter
As a team of passionate students in the field of robotics, we are eager to compete in the Robothon® - The Grand Challenge. Our goal is to showcase our skills and gain practical experience in a real-world competition setting while networking with other robotics experts from around the globe. With diverse backgrounds in mechatronics, mechanical engineering, electrical engineering, and high school education, we bring innovative solutions from various perspectives. We believe that our knowledge and abilities will enable us to successfully complete the tasks and make a valuable contribution to improving industrial recycling processes
- Manipulator: ABB IRB120, ABB, CRB1100
- End effector: Parallel Gripper, Pneumatically Actuated, 3D Printed Fingertips
- Sensor: 2D vision sensor, Intel Realsense RGB+D d435
- Tool: door handle opener, rollers built into robot fingers
- E-Waste Device: Check voltage with a power supply and cable wrapping
We are the REAL team! Each of us works in a different direction, e.g., hand manipulation, navigation, task planning, and electrical motor design. But we are united by the same vision to empower humans with robots where everyone could use robots to improve their working efficiency. We participate in the Robothon® competition because it is a great opportunity for us students to do hands-on, real-world robotics problems. That is also why we call ourselves the REAL team
- Manipulator: Universal Robots UR5e
- End effector: Parallel Gripper Electrically Actuated 3D Printed Fingertips
- Sensor 1: On-Arm Intel Realsense D435
- Tool: none
- E-Waste Device: AA Battery Tester
Endowing robots with human-level or super-human-level manipulation skills that potentially can be adapted to the unconstructed environment, and bringing them into real-life is our ultimate goal.
- Manipulator: Flexiv, RIZON 4
- End effector: Custom Fingertips
- Sensor: Intel Realsense RGB+D d435, Built-in Arm Torque, 2D vision sensor, 3D vision sensor, Arm-Mounted Camera, Fixed External Camera
- Tool: none
- E-Waste Device: none
Due to the rising use of electronic gadgets in India, e-waste management has become an increasingly daunting task. There are many slum areas in urban cities in India that poorly manage their e-waste. Even in the majority of urban areas, authorities don’t do a great job of recycling and segregating e-waste. Due to these small regions of unmanaged waste disposal, recycling waste material becomes difficult. In addition to this, most established e-waste recycling plants in India are forced to overlook the safety of their labourers, causing them to work in hazardous environments among other safety compromises, reducing their life expectancy in order to be profitable. The labourers employed in these plants come from poor and uneducated backgrounds making them more susceptible to being exploited as they are not aware of the safety measures to be followed. As a solution to increasing landfills and poor working conditions of e-waste management plants, we formed a team to spearhead the automation of e-waste segregation and bring awareness to the neglected e-waste management in the country. Being part of one of the leading research institutes in the country, we believe that our participation in the competition will pave the way for the development of large scale automated and sustainable e-waste management plants. Furthermore, employees of such plants would be assigned to oversee the operation without coming in direct contact with e-waste toxins and create and enforce a safe environment for workers.
- Manipulator: Universal Robots UR5
- End effector: DH AG 95 Finger Gripper
- Sensor 1: 3D vision sensor
- Tool: none
- E-Waste Device: none
Our team, b-it-bots, consists of four motivated individuals from the Institute for Artificial Intelligence and Autonomous Systems - (H-BRS). As a robotics group, we are involved in the research and development of robot perception, control, manipulation and planning. In robotics, we focus on robustness and fault recovery methods. Robothon® gives us an appropriate task specification for validating our approaches in robust robot perception and complaint manipulation. We see Robothon® as an opportunity to push the boundaries of robotics and have healthy competition with international teams. We wish good luck to all the teams!
- Manipulator: Kinova Gen3
- End effector: Robotiq Hand-E
- Sensor: 2D vision sensor, 3D vision sensor, Arm-Mounted Camera, Built-in-Arm Force Sensor, Robotiq FT 300-S
- Tool: 3d printed probe holder
- E-Waste Device: Probing voltage on a Powerstrip
As a team, we are thrilled to participate in the Robothon® competition, as it provides an outstanding opportunity to showcase our skills and contribute to the advancement of robotics. Our experience in ROS, machine learning, and human-robot interaction, including developing an autonomous wheelchair with a robotic arm that performs manipulation tasks for patients who are unable to move and handle objects, has equipped us with the knowledge and expertise to excel in this competition. We strongly believe that our proficiency in robotics software and machine learning will help us develop an effective solution for the competition task board and advance the field of human-robot collaboration. We are dedicated to finding innovative solutions to real-world challenges and are eager to collaborate with other robotics enthusiasts to push the boundaries of the field. Moreover, we are confident and excited to enhance our robot manipulation skills and apply them in HRI to further benefit society.
- Manipulator: Kinova Gen3
- End effector: Robotiq 2F-85
- Sensor: Intel Realsense RGB+D d435 Robotiq FT 300-S
- Tool: none
- E-Waste Device: none
“Success is a journey not a destination“ Arthur Ashe
- Manipulator: Epson VT6
- End effector: 3D Printed Fingertips Custom Fingertips
- Sensor: Fixed External Camera
- Tool: none
- E-Waste Device: none
The urgency of today's global challenges, like waste decomposition and industrial automation, together with the aging society in many countries demand robotic manipulation. We want to provide a solution for that! Therefore, we exploit the state-of-the-art in object detection and robotic manipulation. But we even go one step further: exploring bringing automation of work places that were designed for humans and enlarging the possible application scenarios, we target a dual-arm manipulation systems.
- Manipulator: Franka Emika Panda, GoFa ABB
- End effector: Franka Emika Hand
- Sensor: Arm-Mounted Camera
- Tool: Custom printed finger tips
- E-Waste Device: Multimeter switching and OCR of values on screen
With the step to bring it from science to the field of engineering, more people can perform in this field. Scientific competitions like the Grand Challenge enable students to perform better and help to build up a professional network. The team is highly motivated to demonstrate its abilities.
- Manipulator: Franka Emika Panda
- End Effector: 3D Printed Fingertips, Parallel Gripper, Electromagnet, Franka Emika Hand
- Sensor: 2D vision sensor, 3D vision sensor, Arm-Mounted Camera, Built-in Arm Torque, Built-in-Arm Force Sensor, Fixed External Camera
- Tool: none
- E-waste device: none
Women in AI and Robotics Team Germany Statement: We are a team of three highly skilled and motivated women with diverse backgrounds in AI and robotics. We are excited to participate in the upcoming Robothon® event and collaborate with like-minded individuals to develop innovative solutions. Our team consists of Liu, who has exceptional proficiency in programming and hands-on expertise in robotics, Shehzadi, whose expertise in computer vision techniques and project management will be valuable, and Farshad, whose advanced knowledge in machine learning and computer vision will contribute greatly to our team's solutions. As women in AI and robotics, we are committed to creating a more diverse and inclusive industry and supporting other women in the field. We look forward to the opportunity to participate in the event and showcase our skills.
- Manipulator: Franka Emika Panda
- End effector: Franka Emika Hand
- Sensor 1: Intel Realsense RGB+D d435
- Tool: none
- E-Waste Device: none
Team Submission Video - none, dropped out
Back-to-Back Trials Video - none, dropped out
Documentation - none, dropped out
As a group of robotics enthusiasts, we are highly motivated to participate in robotics hackathons because we see these events as opportunities to learn, grow, and innovate in the field of robotics. We are also committed to increasing the visibility of women in robotics and AI. We recognize that hackathons and other events in the field are often male-dominated, and we see this as an opportunity to showcase the skills and contributions of women in robotics. Through our participation in the Robothon®, we aim to foster a more supportive and inclusive community for all robotics enthusiasts.
- Manipulator: xArm UFactory
- End effector: 3D printed finger gripper
- Sensor: N Robotics RGB-D Camera
- Tool: none
- E-Waste Device: none
Team Submission Video - none, dropped out
Back-to-Back Trials Video - none, dropped out
Documentation - none, dropped out
The PLATOnics team is driven by a common vision: a future where robots are safer, smarter, and more versatile. Our goal is to advance the field of robotics by contributing to the research and development of cutting-edge automation technologies. By automating complex tasks in dangerous or hazardous environments, we hope to reduce the risks faced by humans in these situations. We believe that robots can be adaptable and easily reprogrammed based on human interactions, making them more intuitive and user-friendly. Our decision of joining Robothon® 2023 stems from a desire to push the boundaries of what is possible, and to create a safer, more efficient world.
- Manipulator: Franka Emika Panda
- End effector: Franka Emika Hand 3D Printed Fingertips
- Sensor: Intel Realsense RGB+D d435 Built-in-Arm Force Sensor Built-in Arm Torque
- Tool: non
- E-Waste Device: laptop disassembly of battery, hard drive, RAM
As SYNBotics, we are competing in Robothon® to showcase our skills in robotics and learn from other professionals in the field. Our motivation stems from our passion for providing smart automation solutions for industrial use cases and pushing the boundaries of what is possible in the field of robotics and automation. Our intention is to make a significant impact in the competition and contribute towards addressing pressing challenges.
- Manipulator: Universal Robots UR5e
- End effector: Robotiq Hand-E
- Sensor: Microsoft Azure RGB+D Camera, Intel Realsense RGB+D d435
- Tool: none
- E-Waste Device: none
The future belongs to those who are willing to take risks and push boundaries. Let's design robots that are not only efficient but also environmentally responsible. As a team, we are passionate about robotics and its potential to revolutionize the world we live in. We believe that participating in Robothon® will not only challenge us to think creatively and collaboratively but also allow us to showcase our skills and contribute to the advancement of robotics technology. We are excited to be a part of this competition and to learn from and collaborate with fellow robotics enthusiasts.
- Manipulator: DENSO, VS FAST SERIES
- End effector: 3D Printed Fingertips Pneumatically Actuated Parallel Gripper
- Sensor: Arm-Mounted Camera, External Force Sensor, Fixed External Camera
- Tool: none
- E-Waste Device: none
We are a young team of robotics enthusiasts from Accenture Labs. We discovered Robothon® Grand Challenge thanks to our colleagues who competed last year. The subject of E-Waste aligns with our company ideals of environmental sustainability all while giving our team its first big challenge. This competition allows us to raise more awareness on the topic of electronic waste internally while further developing our skills in manipulation and automation.
- Manipulator: Franka Emika Panda
- End effector: 3D Printed Fingertips, Franka Emika Hand
- Sensor 1: Arm-Mounted Camera, Built-in-Arm Force Sensor, Built-in Arm Torque
- Sensor 2: Intel Realsense RGB+D d455
- Tool: none
- E-Waste Device: Multimeter resistance probing of DC motors
Team EcoBot is a group of 4 enthusiastic engineers from Hochschule Schmalkalden. We have joined together in this competition since our areas of interest align with the skills tested by this challenge. Robothon® 2023 is a perfect opportunity for us to show our capabilities while addressing a real-world problem. Our objective is to observe and learn as much as possible from this experience and to create a positive impact by developing a viable solution for e- waste handling
- Manipulator: Universal Robots UR5e
- End effector: 3D Printed Fingertips, Custom Fingertips, Pneumatically Actuated
- Sensor 1: intel Realsense RGB+D d435 Webcam
- Tool: none
- E-Waste Device: Battery voltage testing with OCR
Team Upcyclers is composed by members of the Human-Robot Interfaces and Interaction lab, at Istituto Italiano di Tecnologia. We strongly believe in the recycling process and our goal is to promote sustainable consumption and production practices. The Robothon® Grand Challenge offers a great chance to boost further developments of our framework, taking advantage of our promising results in this field.
- Manipulator: Franka Emika Panda
- End effector: 3D Printed Fingertips, Franka Emika Hand, Robotiq 2F-85
- Sensor 1: Intel Realsense RGB+D d435
- Sensor 2: Intel Realsense RGB+D d435i
- Tool: none
- E-Waste Device: Battery Voltage testing with remote and multimeter
Competition results 2023
Download the Scorecard here!


Robothon® 2021 - 2023
Team submissions 2022
For us CARI Team members (from STIIMA C.N.R and the University of Brescia), Robothon® 2022 is the perfect occasion to test and compare the results of our research over the past years with the robotics community. The Robothon® presents a challenging scenario for disassembly where our previously developed algorithms for assembly and disassembly applications can be further tested and improved. Furthermore, this represents an opportunity to continue developing and improving the robotic skills acquired during the Robothon® 2021 challenge.
- Manipulator: Universal Robots UR3
- End effector: Electric Pinch Gripper (Robotiq HAND-E)
- Finger: From Gripper Manufacturer
- Sensor 1: Fixed Overhear Camera with Ring Light
- Sensor 2: Built-In Arm Servo Motor Current
- Tool: Metal Flatblade
- E-Waste Device: Old Computer and Motherboard, RAM/Batt/Cable removal
Our team is part of the inte-R-action lab and Centre for Autonomous Robotics (CENTAUR) at the University of Bath. We work in a variety of aspects of robotics and machine learning for applications in human-robot interaction, active sensing and perception and control. We are motivated to participate in Robothon® to challenge ourselves as a team and put in practise our expertise. We believe this is a unique opportunity to show our work based on the activities of this competition, but also, to create links and share our expertise with other teams for future collaborations and discussions to address challenges in autonomous robotics.
- Manipulator: Universal Robots UR3e
- End effector: Electric Pinch Gripper (Robotiq 2F-140)
- Finger: Custom with Silicon Mold
- Sensor 1: On-Arm Camera (Intel Realsense d435i)
- Sensor 2: Built-In Force Torque Sensors from Arm
- Tool: None
- E-Waste Device: None
E-waste is both, an enormous challenge as well as an opportunity that could possibly be solved by modern robotics paired with state of the art image processing and machine learning. As a team of four master’s students from UAS Technikum Vienna, we are eager to show the possibilities and furthermore demonstrate the skills we learned during our studies, to tackle the challenge and provide solutions that are long overdue.
- Manipulator: ABB IRB1100
- End effector: Electric Pinch Gripper (Robotiq 2F-85)
- Finger: 3D Printed
- Sensor 1: On-Arm Camera (Intel Realsense d435i)
- Sensor 2: None
- Tool: Battery Fixture
- E-Waste Device: Digital Camera Battery Removal
Team OSCAR is composed of members of three laboratories of CEA LIST, a French technological research organization. The team covers fields of robotics, vision, software development and machine learning. Through one of its main research programs focusing on interactive robotics, CEA LIST aims at developing a new generation of interactive intelligent robots able to perform adaptative manufacturing tasks. Our underlying goal is to develop fast and easy ways to program robots, with intelligent task sequencing, integrated sensing and fault recovery, without sacrificing cycle time. We see the Robothon challenge as the best way to field test our robot manipulation skills and push them to their limits, as well as a unique opportunity to compete and benchmark with great international teams.
- Manipulator: Franka Emika Panda
- End effector: Electric Pinch 2-Finger Gripper (Franka Emika)
- Finger: 3D Printed with metal fingernails
- Sensor 1: Fixed Angled Camera (Photoneo)
- Sensor 2: Built-In Force Torque Sensors from Arm
- Tool: None
- E-Waste Device: Label Printer Battery Removal
We are a diverse team that are part of PakBot for the competition „Robothon® – The Grand Challenge 2022“. We are a collaborative team from Pakistan and represent the industry (Services Syndicate Pvt. Ltd. & VisualSoft Global LLC) as well as academia (Robot Design and Development Lab, National Centre of Robotics and Automation). The driving motivation behind PakBot is to solve real-time robotics and automation problems and infuse the benefits of Industry 5.0 into Pakistan’s economy. We intend to learn valuable problem-solving strategies and smart solutions to manage E-waste from this competition. Hence, it will open up new horizons in the field of E-waste management in Pakistan, impacting the sustainable eco-system of our industries.
- Manipulator: Universal Robots UR5e
- End effector: Electric Pinch 2-Finger Gripper (Robotiq 2F-85)
- Finger: From Gripper Manufacturer
- Sensor 1: On-Arm Camera (Robotiq Wrist Cam)
- Sensor 2: Wrist Force Torque Sensor (Robotiq FT-300)
- Tool: None
- E-Waste Device: RF Remote
Team Pandaria 2.0 is a group of students of Robotics and Electrical Engineering from TU Munich. Our specializations reach from real-time motion planning and full-body collision avoidance up to robot design testing for safe pHRI. On this basis, we are motivated to take on the E-waste challenge using our creativity and collective knowledge as a team. We thereby understand the challenge as an opportunity to learn as much as we can and to get a broader understanding of the state-of-the-art capabilities in robotics. We wish all teams a fair competition!
- Manipulator: Franka Emika Panda
- End effector: Electric Pinch 2-Finger Gripper (Franka Emika)
- Finger: From Gripper Manufacturer
- Sensor 1: On-Arm Camera (Intel Realsense d435i)
- Sensor 2: Built-In Force Torque Sensors from Arm
- Tool: None
- E-Waste Device: None
We, Team RoboPig from Hochschule Würzburg-Schweinfurt, are robot enthusiastic students from different disciplines. The Robothon® Grand Challenge is a good opportunity for us to try out the latest robotic technologies in a practical way. We want to use the experience gained for our studies and future jobs and contribute in making Germany one of the leading robotics nations in the long term. The most important thing for us, however, is having fun and networking with people who are enthusiastic about robots. We are ready to go!
- Manipulator: Universal Robots UR5e
- End effector: Electric Pinch 2-Finger Gripper (Robotiq HAND-E)
- Finger: 3D Printed
- Sensor 1: On-Arm Camera (Intel Realsense d435i)
- Sensor 2: Built-In Force Torque Sensors from Arm
- Tool: Metal Flatblade
- E-Waste Device: Calculator Battery Detection/Classification & Removal
We, team RoboTechX MDX from the Middlesex University Dubai, love solving problems and we are excited to participate in „Robothon® – The Grand Challenge 2022“ as the outcome can be implemented in real life to make our world a better place.
- Manipulator: Epson VT6
- End effector: Pneumatic Pinch 2-Finger Gripper
- Finger: 3D Printed
- Sensor 1: Fixed Overhead Camera with Ring Light
- Sensor 2: None
- Tool: None
- E-Waste Device: AM/FM Radio
Team Singularitas is a team of robotics master and PhD students and one teaching assistant from the Faculty of Electrical Engineering, University of Ljubljana, Slovenia. Together we have knowledge and experiences to tackle any robotics problem and we share a common passion for solving real life problems via robotics and automation. We want to challenge ourselves with new tasks in robotics thus we see a challenge like Robothon® as a great opportunity to contribute to the future of robotics.
- Manipulator: Universal Robots UR5e
- End effector: Electric Pinch 2-Finger Gripper (Robotiq 2F-85)
- Finger: 3D Printed
- Sensor 1: On-Arm Camera (Logitech C920)
- Sensor 2: Built-In Force Torque Sensors from Arm
- Tool: None
- E-Waste Device: Toy Robot and Electronic Piano
Team Robovision from Schmalkalden University of Applied Sciences represents a community of engineers who have been encouraged to work together on technology to solve immediate environmental problems. We want to present an affordable and cost-effective solution to bridge the gap between the high cost of robotics and the cheap workforce.
- Manipulator: IGUS Robolink RL-DC
- End effector: Pneumatic Pinch 2-Finger Gripper
- Finger: 3D Printed
- Sensor 1: On-Arm Camera (Asus ROG Eye USB Camera)
- Sensor 2: None
- Tool: None
- E-Waste Device: None
We are team UTS InterpolatURs from the University of Technology Sydney, Australia. Coming together as undergraduate students with technical skills in mechatronics and robotics, we are highly motivated to combine our theoretical knowledge with our practical experience to compete in „Robothon® – The Grand Challenge 2022“. We are determined to push ourselves to new limits, whilst developing our technical and problem-solving skills that is beneficial for ourselves and the broader community. We look forward to competing against and developing a relationship with the other competitors which will in turn stimulate innovation in robotics research globally.
- Manipulator: Universal Robots UR10e
- End effector: Electric Pinch 2-Finger Gripper (Dynamixel x2)
- Finger: 3D Printed
- Sensor 1: On-Arm Camera (Intel Realsense d435i)
- Sensor 2: Built-In Force Sensors from Arm
- Tool: None
- E-Waste Device: None
We are Team UTS-1 from University of Technology Sydney, Australia. We are intrigued by the five inspired real world industry tasks and its impact on economic challenges in E-waste. Our team intends to actively participate in A.I industrial revolution and shape the future of robotics in science and industry. As a team of final-year undergraduate students we see Robothon® 2022 as valuable opportunity to further develop and apply the robotics knowledge that we have learned throughout our degree. Thanks to our partners as UTS Robotics Institute, we have all the necessary tools to compete in this competition.
- Manipulator: Universal Robots UR10e
- End effector: Electric Pinch 2-Finger Gripper (Dynamixel x2)
- Finger: 3D Printed
- Sensor 1: On-Arm Camera (Intel Realsense d435i)
- Sensor 2: Built-In Force Sensors from Arm
- Tool: None
- E-Waste Device: None
The first generation of Wall-E in 2008 was a sophisticated approach for an electronic waste disposal system. During the Robothon® 2021 we developed an automated solution to perform some disassembly tasks. This year our team from the Technical University of Munich would like to take part in the competition again. We would like to integrate new computer vision pipelines as well as optimized path planning strategies into a next generation. The goal of the new approach being to perform the tasks more reliably and even faster.
- Manipulator: Franka Emika Panda
- End effector: Electric Pinch 2-Finger Gripper (Franka Emika)
- Finger: 3D Printed
- Sensor 1: On-Arm Camera (Intel Realsense d435i)
- Sensor 2: Built-In Force Sensors from Arm
- Tool: Task Board Rail Fixture
- E-Waste Device: Laser Pointer and Battery Charging Station
We, Team WasteHandlerX, are a team of robotics enthusiasts, spread across Europe. On our journey for continuous education, we stumbled across the Robothon® Grand Challenge, where “disassembling and sorting e-waste” aligns with our company ideals of environmental sustainability all while bringing our band of “roboticists in training” together under one common goal. This competition allows us to raise more awareness on the topic of electronic waste globally while further developing our skills in manipulation, inspection, and automation as an international team.
- Manipulator: Franka Emika Panda
- End effector: Electric Pinch 2-Finger Gripper (Franka Emika)
- Finger: From Gripper Manufacturer
- Sensor 1: On-Arm Camera (Intel Realsense d435i)
- Sensor 2: Built-In Force Sensors from Arm
- Tool: Wooden Block
- E-Waste Device: None
We are the WasteWatchers, Wolfgang, Simon, Patryk, Chris, four students of the UAS Technikum Wien, working for a future in which human innovation and technological advancement can be celebrated without drawbacks. As engineers, we see it as our duty to use our knowledge and skills to make our products more sustainable and reduce the footprint our consumption-driven society is leaving on this earth. We participate with our university’s slogan in mind: “The future isn’t cancelled.“
- Manipulator: ABB IRB1100
- End effector: Electric Pinch 2-Finger Gripper (Robotiq 2F-85)
- Finger: 3D Printed
- Sensor 1: On-Arm Camera (Intel Realsense d435i)
- Sensor 2: None
- Tool: None
- E-Waste Device: None
Competition results 2022