Mobilität, Flexibilität, Produktivität – Mobile Robots in Production
Showcase mit Live-Demo: Mesh-Up 2025

Mobile Roboter revolutionieren sowohl Logistikanwendungen als auch die Produktion. Doch der Schritt zur (Teil-)Automatisierung bedeutet für viele Firmen eine große Herausforderung in der IT-Architektur – vor allem, wenn Roboter unterschiedlicher Hersteller in einer gemeinsamen Flotte und auf gleichen Verkehrswegen genutzt werden sollen. Eine praxistaugliche Lösung: die VDA 5050. Erleben Sie die offene Kommunikationsschnittstelle live beim Mesh-Up 2025.
Mehr Interoperabilität, bitte
Mit der zunehmenden Automatisierung von Produktions- und Logistikprozessen wächst auch die IT-Komplexität. Jeder mobile Roboter, jede neue Lösung verfügt über eine eigene Softwaresteuerung, die in die vorhandene IT-Infrastruktur eingebunden werden muss. Außerdem wollen sich Anwender individuell und flexibel für unterschiedliche Hardware-Hersteller entscheiden können. Die Automobilindustrie war eine der ersten Branchen, die sich für die Entwicklung einer Open-Source-Kommunikationsschnittstelle aussprach und in die Entwicklung der VDA 5050 mit einstieg. So dass heute unterschiedliche mobile Roboter in einer gemischten Flotte mit nur einer Leitsteuerung betrieben werden können. Mission completed.
Mesh-Up erleben – und für sich umsetzen
Wie funktioniert die offene Kommunikationsschnittstelle zwischen Leitsteuerung und verschiedenen mobilen Robotern in der Praxis? Für welche Usecases eignet sich die VDA 5050 und was ist bei der Projektanbahnung und -umsetzung zu beachten? Neben der großen Live-Demo bietet das Mesh-Up 2025 direkten Kontakt zu Experten vor Ort, um sich über konkrete Anwendungsmöglichkeiten auszutauschen und einen praxisnahen Einblick rund um das Thema Machbarkeit und Implementierung zu erhalten.
Rückblick Mobile Robots in Production 2025



 Video abspielen
Video abspielen



Produktionslogistik im Fokus
Aus der Praxis für die Praxis. Das Mesh-Up 2025 fokussiert das Zusammenspiel von Logistik und Produktion, genauer: die Materialversorgung/-übergabe sowie die Verkettung von Anlagen und Arbeitsplätzen. Warum sich das gezeigte Szenario wieder an echten Prozessen orientiert? Um zu zeigen, dass die zentrale Steuerung von heterogenen Flotten mit nur einer Software dank VDA 5050 längst in der Praxis angekommen ist.
Moderierte Live-Demonstrationen
Der Showcase zeigt eine Flotte von unterschiedlichen mobilen Robotern, die Transport- und Manipulatoraufgaben in der Produktionslogistik übernehmen. Der Clou ist, dass nur eine Leitsteuerung insgesamt zehn Roboter von acht verschiedenen Anbietern orchestriert. Möglich wird das durch die Nutzung der offenen Kommunikationsschnittstelle VDA 5050.
Für Anwender bedeutet das Flexibilität in der Soft- und Hardwareauswahl. Unterschiedliche Transportanforderungen können mit geeigneten Robotern abgedeckt und zentral über eine Software gesteuert werden. Diese übernimmt das Verkehrs- und Auftragsmanagement, so dass die Fahrzeuge bspw. auch gleiche Fahrwege nutzen können – für die Automatisierung in bestehenden Produktionsanlagen ein echter Gamechanger.
Wo: Halle B4, Stand 330
Uhrzeiten: 13:30 Uhr / 14:30 Uhr / 15:30 Uhr
Sprache: Englisch
Uhrzeiten: 10:15 Uhr / 11:15 Uhr / 12:15 Uhr
Sprache: Englisch
Uhrzeiten: 10:15 Uhr / 11:15 Uhr / 12:15 Uhr
Sprache: Englisch
Zeit: Fr: 13:30 Uhr
Sprache: Deutsch
Der Showcase im Detail
Prozesse einer Produktionslogistik:
- Zentrale Leitsteuerung der gemischten Roboterflotte durch MHP
- Ein- und Auslagerung von Paletten durch einen vollautomatisierten Transportroboter mit Hubfunktion von ek robotics
- Lastenübergabe an ein Unterfahr-Fahrzeug von KUKA und Lastabnahme von einem weiteren Unterfahr-Fahrzeug von SAFELOG
- Transport der Ladung an einen Handarbeitsplatz: Entnahme und simulierte Werkstückbearbeitung
- Weitertransport der Werkstücke zum Warenausgang durch einen mobilen Roboter von dpm
- Übergabe des befüllten KLT an eine Bereitstellungsstation von WAITKUS
- Übergabe des leeren KLT nach Warenentnahme durch einen OMRON-Manipulator an einen mobilen Roboter von SAFELOG
- Automatisierter Leerguttransport (Palette und KLT) zu einer Roboterzelle von INOS durch mobile Roboter von KUKA und Bosch Rexroth
- Abtransport der bestückten Palette durch ein Unterfahr-Fahrzeug von SAFELOG
- Einbindung eines Reinigungsroboters von Kärcher in die Roboterflotte über VDA 5050
Außerdem: Integration des Forschungsprojekts M2X zur Untersuchung weiterer Schnittstellenbedarfe für den automatisierten Einsatz mobiler Roboter. Gezeigt wird die direkte Kommunikation zwischen einem Roboter des Fraunhofer IML und einer aktiven Station (Maschine oder Anlage).
Die moderierte Live-Demonstration auf der Aktionsfläche wird auf große Screens übertragen. Zeitfenster: Dienstagnachmittag, Mittwochvormittag, Donnerstagvormittag und Freitagnachmittag.
Kleine Preview gefällig? Hier geht’s zum Making of Mesh-Up.
Die Teilnehmer im Überblick











Insights: Mobile Roboter auf dem Vormarsch
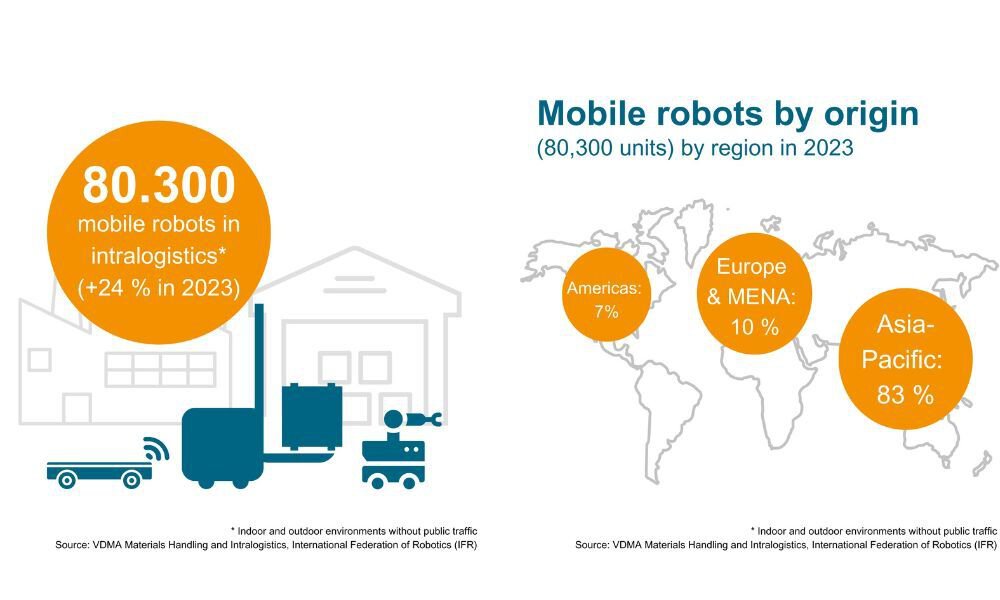
Fast 113.000 Roboter wurden 2023 laut dem Jahresreport „World Robotics – Service Robots“ der International Federation of Robotics (IFR) für Transport- und Logistikaufgaben verkauft. Knapp 80.300 von ihnen sind mobile Roboter, die Indoor oder Outdoor Material transportieren, in der Produktionsversorgung oder im Lager zum Einsatz kommen sowie zur Be- und Entladung von LKWs und Paletten genutzt werden.
VDA 5050 – die wichtigsten Hintergründe
Die Abstimmung zwischen mobilen Robotern wird in Lager und Produktion zunehmend wichtiger. Denn die Anzahl der Materialtransporte wächst, aber nicht die zur Verfügung stehenden Flächen. Genauso steigt die Zahl der Hersteller und Systeme, was der Gestaltung einer einheitlich operierenden Flotte entgegensteht. Diese Rahmenbedingungen führten 2017 zu einer besonderen Kooperation: zwischen dem Verband der Automobilindustrie (VDA) und dem VDMA-Fachverband Fördertechnik und Intralogistik.
Die Partner stellten ein Projektteam aus Herstellern mobiler Roboter, Anbietern von Leitsteuerungs-Software und Anwendern aus der Industrie zur Entwicklung einer Schnittstelle zusammen. Ziel und Resultat: Fahrzeuge und Leitsteuerung sollen herstellerunabhängig miteinander kommunizieren können. 2019 wurde die erste Version von VDA 5050 veröffentlicht und seitdem kontinuierlich an die aktuellen Marktanforderungen angepasst. Die aktuelle Version 2.1.0 ist über ein öffentliches GitHub Repository zugänglich und kommentierbar.
Datum | Dienstag, 24. Juni bis Freitag, 27. Juni 2025 |
Uhrzeit | Dienstag: 10:15; 11:15 und 12:15 jeweils 15 min |
Ort | Halle B4.330 |
Sprache | Englisch |