umati@automatica for networking and condition monitoring
Interoperability is traditional automatica topic – it refers to the ability of various devices or machines to interconnect and communicate regardless of their manufacturer, thus facilitating data access for end users. The umati dashboard takes this kind of networking to a new level: The demonstrator comprises various machines, robots, machine vision systems, and tightening systems distributed across five halls with smartphone-based data access. Participating exhibitors: ABB, Asentics Vario, Asentics Vision Technology, Beckhoff, DEPRAG, EPSON, FANUC, KEBA, KUKA, MVTec, SIEMENS, spin-robotics, WEBER and Yaskawa.
Standard of the future: The umati dashboard is based on OPC UA, an open interface that unlocks digital networking, runs on various operating systems, and ensures manufacturer-independent compatibility. The OPC UA Companion Specifications are industry-specific standard specifications defining the use of OPC UA in certain domains such as robotics, machine vision, or in tightening systems.
A reality check of connectivity
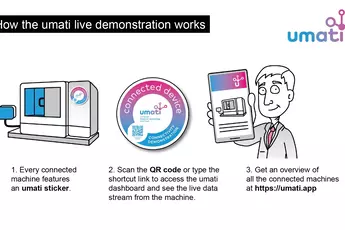
This is the perfect opportunity for anyone requiring quick and easy access to a network of machines, robots, machine vision systems, and tightening systems of different manufacturers. All you need is a smartphone to scan QR codes of the individual exhibits. Once the umati dashboard appears on your screen, you have an option of viewing various data and machine information – relating to condition monitoring or things like axis position and robot axis speed. Who will be there? The VDMA stand provides an overview of all participating exhibitors and machines.
Connected Machines at automatica – the experience:
What is umati?
umati (universal machine technology interface) is an initiative by mechanical engineering companies and their customers looking to promote and use open, standardized interfaces based on OPC UA. Their goal is to make data exchange among machines, components, and plants a simple, seamless, and secure process that can be integrated into customer- and user-specific IT eco-systems. umati aims to unlock new potential for the global production of the future.
What is OPC UA?
OPC UA is an acronym for Open Platform Communications Unified Architecture. It is a machine-to-machine communications protocol used in industrial automation and other areas. OPC UA is a standardized and safe way of exchanging data and information between machines, devices, and applications – regardless of their platform and manufacturer. The objective: to achieve interoperability between various systems and applications, and to facilitate the integration of data from different sources within a common framework.
What are Companion Specifications?
OPC UA Companion Specifications are industry-specific standard specifications specifying possible OPC UA use cases in certain domains such as robotics, machine vision, or in tightening systems. They are based on the OPC UA core standard and offer additional concepts, objects, and services tailored to these fields of application.
Date | Tuesday, June 27 to Friday, June 30, 2023 |
Time | Daily 9:00 to 17:00 (Tu-Th) or 16:00 (Fr) |
Location | Central meeting point: Hall B5, Stand 218 |
Language | German or English |